top of page
Efficient Robotics System and Data Pipeline
OXE-AugE: A Large-Scale Robot Augmentation of OXE for Scaling Cross-Embodiment Policy Learning
Guanhua Ji*, Harsha Polavaram*, Lawrence Yunliang Chen* (co-corresponding author), Sandeep Bajamahal, Zehan Ma, Simeon Adebola, Chenfeng Xu (co-corresponding author), Ken Goldberg [ICML 2026 Spotlight Website]

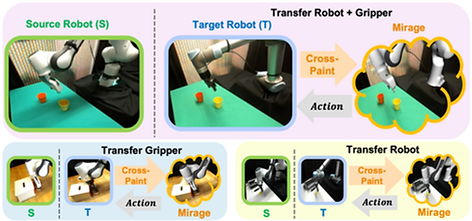
Mirage: Cross-Embodiment Zero-Shot Policy Transfer with Cross-Painting
Lawrence Yunliang Chen*, Kush Hari*, Karthik Dharmarajan*, Chenfeng Xu, Quan Vuong, Ken Goldberg (RSS 2024) [Project page]
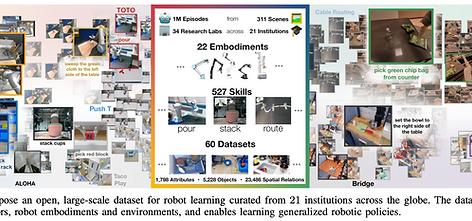
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Google Team, Chenfeng Xu, et al. [Project page] (ICRA 2024 Best Paper)
bottom of page